







FACE
日本設備管理学会 奨励賞受賞 リハビリテーションを目指した義手の作成

大学院工学研究科 博士前期課程 知能システム工学専攻 1 年
山口 直弥
知能システム工学専攻・ヒューマンインタフェース研究室(小越康宏准教授)では、ヒトの脳や筋肉の活動の様々な特徴を捉え、それらの情報を利用して意思をダイレクトに機械に反映させるシステムについて研究しています。特に、障害者や高齢者が安定して自立した社会生活を送る上で、不便さの軽減をサポートするシステムの構築に焦点を当て、医療機関と連携した研究を進めています。私は脳性麻痺・脳卒中などが原因で手足に麻痺が残る患者を対象にした新しいリハビリテーションシステムに関する研究開発を行っています。
近年、歩行訓練をはじめとするリハビリロボットが普及しており、リハビリ効果の期待が高まっています。上肢のリハビリロボットにおいては、特定の繰り返し運動などを補助するものが多く、患者の望む運動を実現するためには解決すべき課題が残っています。望む運動が実現できれば患者の喜びにつながり、リハビリ意欲を高く維持できると考えています。最終的には補助なしで運動を実現できるところまで回復することを目標に考えています。
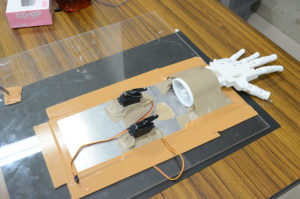 今回の発表では、腕の各筋肉の筋電位を読み取り、患者の望む運動を推論し、その運動の補助を行うリハビリテーションシステムを提案しました。提案システムの主部分は、筋電検出部・運動推論部・動作部(ロボットハンド)で構成されています。具体的には、筋電検出部において患者の腕の各筋肉の筋電位を検出し、運動推論部では筋電情報を基に運動内容を推論します。そして患者の手に添えたロボットハンドを制御することで、患者が望む運動の補助を実現するものです。このロボットハンドは、3D プリンターを用いて人間の手のモデルを造形し、サーボモータにより各指の独立動作が可能な機構を実現し、受賞となりました。
今回の発表では、腕の各筋肉の筋電位を読み取り、患者の望む運動を推論し、その運動の補助を行うリハビリテーションシステムを提案しました。提案システムの主部分は、筋電検出部・運動推論部・動作部(ロボットハンド)で構成されています。具体的には、筋電検出部において患者の腕の各筋肉の筋電位を検出し、運動推論部では筋電情報を基に運動内容を推論します。そして患者の手に添えたロボットハンドを制御することで、患者が望む運動の補助を実現するものです。このロボットハンドは、3D プリンターを用いて人間の手のモデルを造形し、サーボモータにより各指の独立動作が可能な機構を実現し、受賞となりました。
現在、提案したシステムを使って、運動意思の推論精度の向上を目指しています。
また、健常者を対象に評価実験を進め、実際のリハビリの現場で役に立てたいと考えています。さらに、患者の動作や心理的要因も考慮した無理のないリハビリが行えるシステムの実現を目指すことが夢です。


